
The Early Days of GET Loss Detection
Miners have been trying to prevent GET jamming crushers, and the lost production and safety risks associated, for decades.
Technology that can reliably detect GET loss events and quickly locate lost GET is the solution.
However, the industry has lacked the right technology, due to the extreme conditions encountered in global mining, to reliably monitor and prevent ground engaging tools (GET) from entering processing plants.
Sensing while digging is challenging, due to the extreme physics required in ultra-class mining equipment. Research has found that human operators can only process 50 tasks at once so missing teeth or other GET often goes unidentified, especially towards the end of grueling 12-hour shifts.
The critical success factors of any GET loss detection system are loss event detection reliability, false alarms, system reliability, and the ability to locate lost GET.
A mine site is one of the harshest environments that machinery operates in, so any solution in this space needs to be highly robust. Not only that, but it needs to perform with high confidence 24/7.
GET and Teeth Monitoring Technologies
There are multiple techniques when it comes to GET loss detection. They can be broadly classified into vision/perception or sensor systems.
Perception-based systems include:
Stereo Cameras
Stereo cameras use multiple lenses with image sensors like a camera, which capture images and attempt to compute 3D images that track the GET on the front of the bucket.
Limitations
Stereo cameras come with some significant limitations when deployed in harsh mining conditions. The camera needs a particular viewing angle on GET to identify individual components effectively when the images are captured, which can be challenging to achieve on most machines (with the exception of electric rope shovels). Even then, typically they can only detect teeth, not other components making up almost 50% of GET on a bucket, such as wing shrouds.
Since the camera must be mounted to achieve a line of sight view, it’s subjected to intense shocks and vibrations, requiring a very high standard of installation.
There are also difficulties with maintenance access, bringing additional complications due to working at heights.
Mine sites are inherently dusty and operate 24/7, and we all know cameras can’t work with a dirty lens. So there are frequent functionality impacts due to dust, weather, and lighting, which lead to unreliable tracking of the GET. You can see below some of the strengths and weaknesses of this approach:
Strengths
As a non-contact system, this approach is GET-manufacturer agnostic and can work with any make of GET – provided the line of sight and good vision is achieved.
Compared to sensor systems, they tend to have a lower impact on operations initially, as there’s a single point of installation for the camera system, but often any initial savings will be outweighed many times over by the cost of one crusher event from an undetected GET loss.
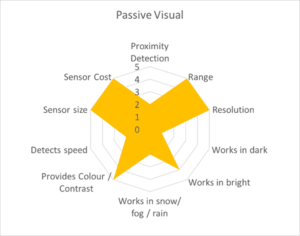
Thermal Cameras
Thermal cameras capture images on the infrared spectrum, allowing tracking of GET based on the temperature it generates through friction forces of digging.
Limitations
Thermal sensors struggle with high levels of accuracy and reliability; which can be compounded by the relatively large ratio of distance of view to object size in this application.
Buckets themselves can run to extreme temperatures, with hot spots developing on the bucket and GET as they dig, throwing off thermal cameras’ ability to track lost GET accurately.
Strengths
Thermal cameras share many strengths with stereo cameras, including more straightforward implementation, lower TCO, and ability to work across any GET manufacturer.
Unlike stereo cameras, thermal sensors can function well in low light and in some environmental applications where light snow and frequent light rain/fog occur, extending their working spectrum.
GET Trakka and Connected Devices
GET Trakka was developed in response to the limitations of perception-based GET tracking systems. The seed started with the idea of using sensors on each piece of GET to track components.
But due to the harsh conditions of digging, no existing sensor was rugged enough to simply stick onto GET.
An idea formed: using the strength of GET steel to our advantage to protect the sensor. The result was embedding the sensor inside the steel, fully protected by the existing steel structure.
Rugged and Performs in Any Environment
The sensor sits protected inside the GET carried on the bucket. It’s not disrupted by environmental effects and works in extreme environmental conditions, from the heat of Namibia and the Pilbara to sub-zero conditions of Canadian winters.
Sensors provide a reliable, high confidence system, monitoring a continuous stream of data by leveraging multiple concepts.
- Cyber-physical Systems – are typically effective in time-critical applications, because it is an intelligent system that integrates computing, sensors, and algorithms to provide a real-time alarm system. GET loss is a high-risk, time-sensitive event, and the operator and dispatch team needs to be alerted in seconds that a loss has occurred.
- Wireless Sensor Network (WSN) – is a network of dispersed sensors that record the physical environment and forward the data to a central hub. Leveraging this approach enables us to maximize both communication effectiveness and energy life in a harsh application.
- The Internet of Things (IoT) – enables us to connect GET (things) to each other and exchange data within a communications network to the internet. GET Trakka uses IoT to transform steel wear parts within a large mining machine into a connected system, sharing data and sensing events, forming a system of new capability on the front edge of mining machines.
Reliable GET Detection
Unlike vision systems which can easily misfire due to dirty lenses, extreme environments, or low lighting, GET Trakka’s sensors minimize any false alarms.
High levels of false alarms lead to operators ignoring real alarms, assuming it’s another misfire, which means that critical GET loss events can be overlooked. With GET Trakka, operators can rely on the in-cab alarm while minimizing the annoyance of false alarms.
Locate Lost GET
GET Trakka’s sensors also enable the location of lost GET within the mine site via a handheld scanner, unlike vision systems which can only alert operators that a GET component has gone missing.
This is a major operational advantage, as mining operations are unable to re-start operations until lost GET is isolated and removed from the mining circuit. GET Trakka reduces this time-consuming, high-cost process of truck load isolation and sorting, to a matter of minutes, scanning the dig region or isolated truck loads.
Limitations
Putting sensors into each GET component leads to a more complex installation process, requiring more resources than vision systems. By its nature, it’s also more complex for supply chain and technology management, with additional components required on site.
But our customers agree that these limitations are a small trade off for a high confidence system of tracking and locating lost GET to prevent safety risks and operational down time.
The Future of GET Loss Detection, Tracking, and Integration
There’s much to be excited about in this application domain over the next three to five years.
Technologies are rapidly advancing through the world’s Industry 4.0 requirements and the emergence of large scale automation; which in turn drives innovation in sensing, computing, AI, and IoT infrastructure.
CR continues to develop platform sensing techniques such as Lidar, which is one of the big beneficiaries of the autonomous vehicle revolution, while also leveraging the power of cloud computing and AI.
CR are continuing to push the boundaries of tooth loss technology, while looking beyond the concept of just tooth loss, to encapsulate full lifecycle and predictive AI technologies. We envision a future where the capability of machines is enhanced by smart buckets, inclusive of tracking, predictive intelligence, performance insights, autonomous safety systems, and connected mine control and resource allocation integrations.